Робот-пылесос iRobot Roomba 581


















| Бренд | США |
| Страна-производитель | Китай |
| Модельный ряд | 2011 |
| Основные характеристики | |
| Тип уборки | сухой |
| Тип пылесборника | пластиковый контейнер |
| Объём пылесборника, л | 1 |
| Площадь уборки на одной подзарядке, м2 | 100 |
| Max мощность, Вт | 33 |
| Индикация заполнения пылесборника | Есть |
| Парковка пылесоса | горизонтальная |
| Уровень шума, дБ | 36 |
| Источник питания | аккумулятор 12 V |
| Цвет | серебряный |
| Гарантия | 1 год |
| Режимы и функции | |
| Уборка гладких полов | Есть |
| Чистка ковров | Есть |
| Программирование | |
| Тип программирования | по дням, по циклам уборки |
| Программы пылесоса | автоматическая уборка, автоматический поиск зарядной базы и парковка, уборка в заданной зоне |
| Расчет времени уборки | Есть |
| Время уборки, мин | 90 |
| Движение робота | |
| Движение | вдоль стен, зигзагом , по спирали |
| Датчики движения | оптический |
| Виртуальная стена | 3 |
| Распознание обрыва | Есть |
| Система антипутаница | Есть |
| Сигнал при застревании | Есть |
| Фильтрация | |
| Фильтрация пылесоса | циклонный |
| Фильтр тонкой очистки | Есть |
| Управление | |
| Тип управления | электронное |
| RF-пульт ДУ | Есть |
| Индикация | |
| Звуковые сигналы | начало работы, окончание, при неполадках |
| Световая индикация | заполнения пылесборника, при неполадках |
| Конструкция робота | |
| Колеса, шт | 3 |
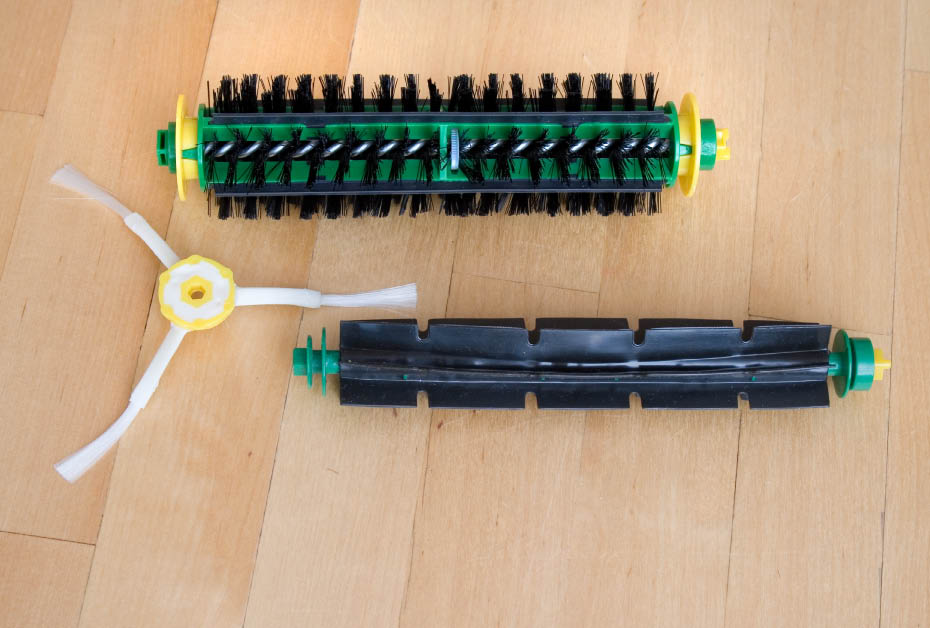
| Селиконовый скребок | Есть |
| Лопастная боковая щетка | Есть |
| Резиновая щетка | Есть |
| Ворсяная щетка | Есть |
| Электропитание | |
| Тип аккумулятора | Ni-Cd (никель-кадмиевый) |
| Емкость аккумулятора, мА*ч | 1500 |
| Комплектация | |
| Зарядная база | Есть |
| Комплект для координации движения, шт | 3 |
| Чистящие салфетки | Есть |
| Гребенка для очистки щетки | Есть |
| Габариты | |
| Ширина, мм | 340 |
| Глубина, мм | 340 |
| Высота, мм | 95 |
| Вес, кг | 3.8 |
Новости роботов-пылесосов

LG представил новинки бытовой техники 2021 года
LG Electronics (LG) показала медиа сообществу, бизнес-партнерам и дизайнерам новинки бытовой техники 2021-2022 гг. Это несколько моделей холодильников, комплекс техники по уходу за одеждой, устройства для кухни, кондиционеры, пылесосы и даже маска для лица, спасающие от вирусов. Все новые модели не только функциональны, но и красивы. Они позволят заниматься домашними делами быстро и эффективно, делают дом уютным и желанным местом для времяпровождения. Подробности внутри, нажимайте!

У какой техники лучшее гарантийное обслуживание
Продавцы любезны при продаже бытовой техники, но не все производители так же любезны и быстры при ее ремонте. Какая компания, по мнению экспертов, предоставляет лучшее гарантийное и послегарантийное обслуживание? Нажимайте, и узнаете, кто и почему стал лауреатом премии «Права потребителей и качество обслуживания» в номинации «Розничные услуги» в категории «Гарантийное и сервисное обслуживание. Бытовая техника и электроника».

Дом мечты с техникой LG
Как построить стильный и удобный дом для большой семьи, какая инновационная техника должна в нем присутствовать, Екатерина Одинцова обсудила с представителями медиа сообщества, бизнес-партнерами LG, а также друзьями из мира искусства, культуры и шоу-бизнеса.

Робот-пылесос Xiaomi ROIDMI Eve Plus: самоочистка и дезинфекция
Робот-пылесос Xiaomi ROIDMI Eve Plus действует в духе времени. Помимо уборки он самостоятельно очищает пылесборник и затем дезинфицирует его. Что еще? Нажимайте и узнаете.

Робот-пылесос Xiaomi Lydsto R1
Благодаря функции самоочищения и высокому интеллекту робот-пылесос Xiaomi Lydsto R1 не только гарантирует чистоту полов и ковров во всём доме, но и самостоятельно очищает пылесборник с помощью станции самоочистки. Как он это делает и что еще умеет? Подробности внутри.
Новости iRobot

IFA 2020: объявлены победители премии IFA PRODUCT TECHNOLOGY INNOVATION AWARD
Девятнадцать инновационных продуктов от ведущих брендов бытовой электроники, таких как HONOR, Midea, Panasonic, Samsung и Siemens стали обладателями премии IFA PRODUCT TECHNOLOGY INNOVATION AWARD.

«М.Видео Electronics Show 2019» - московская выставка мировых достижений
4 и 5 октября можно с пользой провести в Крокус Экспо, тем более синоптики обещают дожди. В 12 зале 3 павильона проходит выставка, на которой всем будет интересно: 40 крупнейших брендов-производителей техники показывают более 500 новых продуктов.
Тесты робота-пылесоса iRobot Roomba 581

Роботы-пылесосы: выбираем домашнего любимца методом тестирования
Год назад мы тестировали 3 модели роботов-пылесосов и ответили на часто задаваемые вопросы о роботах: что они могут, а что – нет, для чего нужны, как ориентируются, нуждаются ли в уходе и дополнительных расходных материалах и т.п. Сегодня тестируем другие модели и говорим об особенностях конструкции и функционале роботов: что удобно, а что – не очень, за что стоит платить, а что лишь кажется преимуществом. Иными словами – на что обратить внимание при выборе робота-пылесоса в ценовой категории от 18 000 до 35 000 рублей.

Тест роботов-пылесосов: это не игрушка - верхом не садиться и не кататься!
На старте теста у нас всего три конкурсанта, так как рынок роботов-пылесосов пока не очень развит, и ориентировались мы на технику средней ценовой категории: бессмысленно сравнивать робота за 6000 рублей с роботом за 60 000.

Тест робота-пылесоса iRobot Roomba 581
Робот iRobot Roomba 581 сам рассчитывает маршрут, распознает вид напольного покрытия и выбирает соответствующий режим уборки, распознает наиболее загрязненные участки и чистит их дольше и тщательнее. При уборке робот двигается по разным траекториям: вдоль стен, по спирали, пересекает помещение, возвращается к скоплениям грязи.
Тесты роботов-пылесосов

Робот-пылесос Starwind SRV7550: убирает и разговаривает
Протестировали работу робота-пылесоса Starwind SRV7550 для сухой и влажной уборки. Посмотрели, как он передвигается, как собирает пыль, как протирает пол, как возвращается на базу. Оценили управление с помощью пульта ДУ и через приложение на смартфоне. Все подробности внутри.

Вертикальный пылесос BBK BV2527 – быстрая уборка
Второй пылесос в доме – не роскошь, а возможность быстро убрать мусор в прихожей, на кухне. Поможет ли с этим вертикальный пылесос BBK BV2527? Проверим в нашем предновогоднем тесте – обзоре.

Робот-пылесос BBK BV3522: моет пол по команде со смартфона
К нам приехал Робот. BBK BV3522 – робот-пылесос для сухой и влажной уборки. Вот он и поможет привести в порядок квартиру перед Новым годом. Хотите узнать, как он с этим справляется? Нажимайте, может и вам нужен такой помощник.

Тест робота – пылесоса BBK BV3521
Цель нашего теста посмотреть, как робот-пылесос BBK BV3521 справляется с уборкой в обычной квартире. Не в условиях офиса, куда его принесли на тест, и специально рассыпали мусор, а в условиях дома, где живут весьма активные люди и кошка, не любящая технику. Сможет ли BBK BV3521 «вписаться в коллектив» и стать полноправным участником быта? Или же ему уготована судьба игрушки на час?

Тест пылесоса DYSON V6 Total Clean: заведующий чистотой с большими возможностями
Уже несколько лет у меня дома чистотой заведует Dyson DC41c, и никаких проблем с уборкой нет. И поэтому, когда ко мне на тестирование приехал беспроводной Dyson V6 Total Clean, я не думала, что он будет особенно востребован: ведь что этот малыш умеет такого, с чем не может справиться его старший брат? Но оказалось, что нашлось дело им обоим.
Обзоры робота-пылесоса iRobot Roomba 581

Роботы-пылесосы: явились - не запылились...
Ни у кого уже не осталось сомнений, что роботы уверенными темпами входят в нашу жизнь. И одну из главнейших ролей в этом процессе играют роботы-пылесосы, прозванные «Robovacs». По многочисленным прогнозам, уже лет через десять любая семья среднего класса будет иметь полностью автоматизированного уборщика
Обзоры роботов-пылесосов

Бытовая техника: 10 лучших 2021 года
Бытовая техника в 2021 году стала умнее, красивее, функциональнее. В нашем итоговом обзоре года самые интересные новинки: вертикальные пылесосы, роботы, вытяжки и варочные панели, сушильные и стиральные машины, техника по уходу за волосами, и даже лазерные телевизоры! Бренды: LG, Samsung, Philips, Dyson, Candy, Hiesense, Elikor, Grundig, Smeg.

Топ 10 лучших новинок этой зимы
В топ 10 лучших новинок бытовой техники зимы 2021 года вошли кофеварка, чайник, блендер, стирально-сушильная машина, робот-пылесос, увлажнитель воздуха, приточно-вытяжная установка, водонагреватель и беспроводные наушники. Большинство моделей мы протестировали и рассказали о них все-все подробности. В общем, посмотрите, вдруг найдется то, что вам пригодится.

10 лучших новинок бытовой техники 2019 - хит-парад
2019 год можно по праву назвать годом малой бытовой техники. Всем интересны гаджеты, помогающие готовить или убирать. Умные, самостоятельные и многофункциональные. Представляем 10 новинок, которые посетителям нашего сайта показались самыми интересными в этом году.

Бытовая техника: 10 новинок лета – выбор читателей и экспертов
Бытовая техника этого лета взяла на себя все хлопоты, она помогала нам сохранить вкус и ароматы каждого дня, радовать близких необычными блюдами, получать удовольствие не только от результата, но и от процесса пребывания на кухне. Итак, 10 новинок этого лета, которые заслуживаю вашего внимания.

Мини обзор пылесоса SAMSUNG VR20H9050UW/EV POWERbot
Модель 2015 года, получившая в 2016 году Национальную премию «ПРОДУКТ ГОДА» в категории «Бытовая техника. Роботы-пылесосы» и вызвавшая горячие споры тестировавших ее специалистов.
Обзоры iRobot

Когда пылесосы убираются насухо
Проследим за процессом уборки. После включения двигателя пылесоса воздух внутри него становится разреженным, и под действием разницы давлений воздушные массы в комнате, а с ними пыль и грязь устремляются внутрь прибора. Далее эта смесь проходит через систему фильтрации, чтобы очищенной от грязи и пыли вернуться обратно в комнату. Поэтому основная задача любого пылесоса не только «заглотить» максимальное количество пыли и грязи, но и не выпустить эту гадость обратно в комнату.
Советы по роботам-пылесосам

Выбираем подарки на 23 февраля
Выбрать подарок на 23 февраля - задача и простая, и сложная. Хочется, чтобы понравился и чтоб пригодился. Мы все проверили, протестировали, и предлагаем на выбор: наушники, колонка, бритва, робот-пылесос, чайник, увлажнитель воздуха. Нажимайте, чтобы узнать больше.

Аккумуляторы роботов-пылесосов: иногда они взрываются
Вы знаете, что иногда у роботов-пылесосов взрываются аккумуляторы? И не только у них: смартфоны, ноутбуки, даже электроскутеры могут однажды превратиться в пылающий факел! Думаете, это не может с вами случиться? Мои друзья тоже так думали. Пока однажды...

Эксплуатируй верно: 17 ошибок и 17 правил использования бытовой техники
Было бы здорово, если бы на упаковке от бытовой техники крупными буквами писали: «Перед использованием прибора ознакомьтесь с инструкцией!», ведь 90% приборов выходят из строя из-за неправильного обращения. Чтобы не тратить деньги и не переживать из-за поломок, придерживайтесь приведённых ниже рекомендаций.

Как теперь выбирать пылесос? Версия магазина Techport.ru
Интернет-магазин Techport.ru подготовил для своих клиентов перечень рекомендаций для выбора пылесоса. Советы специалистов магазина помогут подобрать оптимальный прибор, исходя из его мощности, конструкции, количества выполняемых операций и прочих параметров. Современные пылесосы представляют из себя не просто устройства для очистки пола. Они способны собирать пыль и мелкий мусор, очищать и увлажнять воздух, выполнять влажную уборку, ухаживать за салоном автомобиля и чистить мягкую мебель. Рекомендации интернет-магазина Techport.ru помогут ответить на вопрос: «Как выбрать пылесос?».

Каких клещей убивают роботы?
При уборке луч ультрафиолета робота-пылесоса уничтожает 99 процентов болезнетворных бактерий. Обезвреженные микроорганизмы, их кал и переваренная пища пропылесошены и стерты антистатической салфеткой, мельчайшая пыль собрана и уже не угрожает нашим легким и коже, а благодаря уничтоженной ДНК бактерий, ониуже не могут больше размножаться попав в пылесборник.
Видео о роботах-пылесосах iRobot

Тест роботов-пылесосов: iCLEBO Omega, Neato Connected, iRobot Roomba 980, Xiaomi Mi Robot, Panda X900
Какой робот-пылесос лучше всех? Пора уже разобраться с этим вопросом — решили мы и отобрали для Большого Сравнительного Теста пять самых актуальных на конец 2016 года моделей — iCLEBO Omega, iRobot Roomba 980, Neato Botvac Connected и Xiaomi Mi Robot. Плюс — недорогая, но популярная китайская модель Panda X900...
Видео о роботах-пылесосах

Робот–пылесос BBK BV3522: в погоне за пылью
Робот–пылесос BBK BV3522 предназначен для сухой и влажной уборки. Посмотрим, как он справляется с этими задачами. Проверять будем не в пустом офисе, а в обычной квартире, где ковры, кресла, провода, цветы, тапки и любознательный кот.

В какое измерение уходит Dyson?
Загадочный проект Dyson №223. Сеть переполнена слухами о новом изобретении Dyson. 16 лет работы. 200 инженеров. $46,5 млн инвестиций. Что же может получиться, когда ни цента не украдено? Или... совсем иной прибор, который подобно летающей тарелке изменит нашу жизнь в неизведанную доныне сторону? На этом ролике - лаборатория Dyson, съёмка ведётся с камеры, установленной на главном герое сюжета...

Робот-пылесос YUJIN Robot iClebo Arte
Отличное кино о том, как вы отдыхаете а робот неустанно трудится на ниве уборки целой квартиры. Только успевай ноги поднимать...
Описание модели
По информации производителя, система искусственного интеллекта AWARE использует десятки сенсоров для мониторинга окружения робота, посылая до 67 импульсов в секунду для контроля процесса и качества уборки.
Робот сам рассчитывает маршрут, распознает вид напольного покрытия и выбирает соответствующий режим уборки, распознает наиболее загрязненные участки и чистит их дольше и тщательнее. При уборке робот двигается по разным траекториям: вдоль стен, по спирали, пересекает помещение, возвращается к скоплениям грязи.
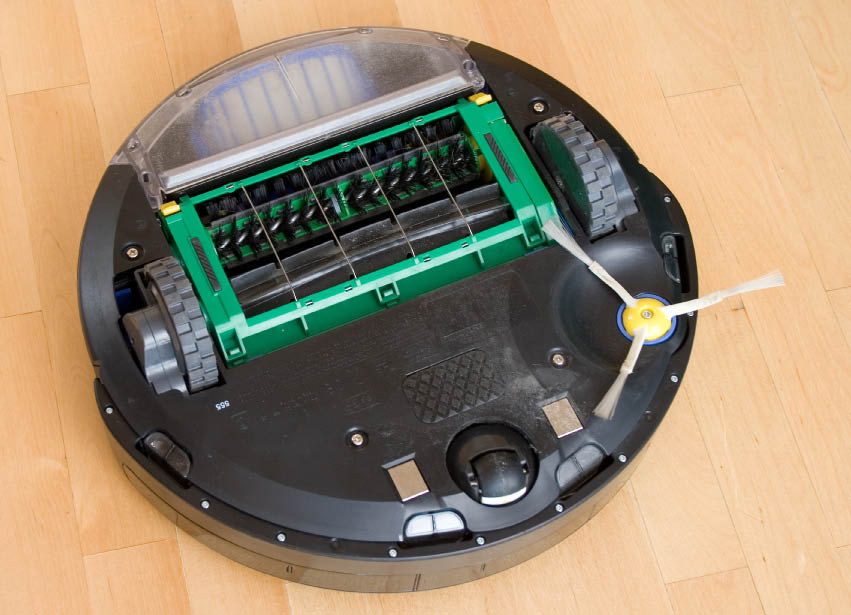
Причем двигаясь вдоль стен, он наезжает на плинтусы и собирает там грязь боковой щеткой (заехал на открытый участок стоящей на полу книжной полки и смахнул пыль с низа корешков книг).
На большой территории может несколько раз проехать по одному и тому же месту, на первый взгляд, не замечая мусора рядом, но потом все же находит его (не было случая, чтобы в зоне действия он оставил видимую грязь).
Хорошо собирает клубы пыли, мелкий мусор, но вот очень мелкая пыль типа рассыпанной муки не собирается полностью, так как здесь нет салфетки для протирания пола, а силы всасывания и усилий резинового скребка для удаления такой пыли не хватает.
Что касается распознавания типа напольного покрытия, то здесь сложно что-либо сказать: на линолеуме, паркетной доске и кафеле робот вел себя одинаково. Высота 9,5 см позволяет заезжать под мебель на низких ножках.
Поведение в сложных ситуациях. В инструкции сказано: «распознает лестницу и перепады высоты и предотвращает падение». Что ж, лестница у нас есть, проверили – действительно, перед ней робот остановился.
Пылесос оснащен системой распутывания при запутывании в проводах: его щетки перестают крутиться, а колесики едут в обратном направлении, помогая выпутаться.
С «засадой» в виде незакрепленного к стене участка антенного провода пылесос справился достойно: освободился один раз секунд через 15, в другой раз помучился подольше, но победил.
Если робот все же запутается в проводах и не сможет освободиться, он остановится, подаст сигналы и не будет зря тратить энергию заряда (чтобы проверить, мы запутали его в пяти проводах, что противоречило инструкции).
Порожек высотой 1 см робот даже не заметил, уверенно переехав через него. Зато, попав в окружение четырех ножек стула, бедняга никак не мог выехать, пришлось спасать его и убрать стул после двух минут усилий робота обрести свободу.
Возвращение на базу не предусмотрено после программы локальной уборки, в остальных случаях робот уверенно возвращается.
Уровень шума. Модель довольно сильно тарахтит. Впрочем, имея опыт сравнения, мы можем назвать уровень шума средним (бывает и громче).
Обращаем внимание, что модель полностью самостоятельна, имеет отличную систему навигации, умеет правильно вести себя в сложных ситуациях, имеет функцию программирования графика уборки и рассчитана на уборку в отсутствии владельцев.
Похожие модели

Робот-пылесос iRobot ROOMBA 625 Pro






Отзывы и комментарии